SSR Scaling Surefooted and Symmetric Humanoid Traversal to the Open World
Abstract
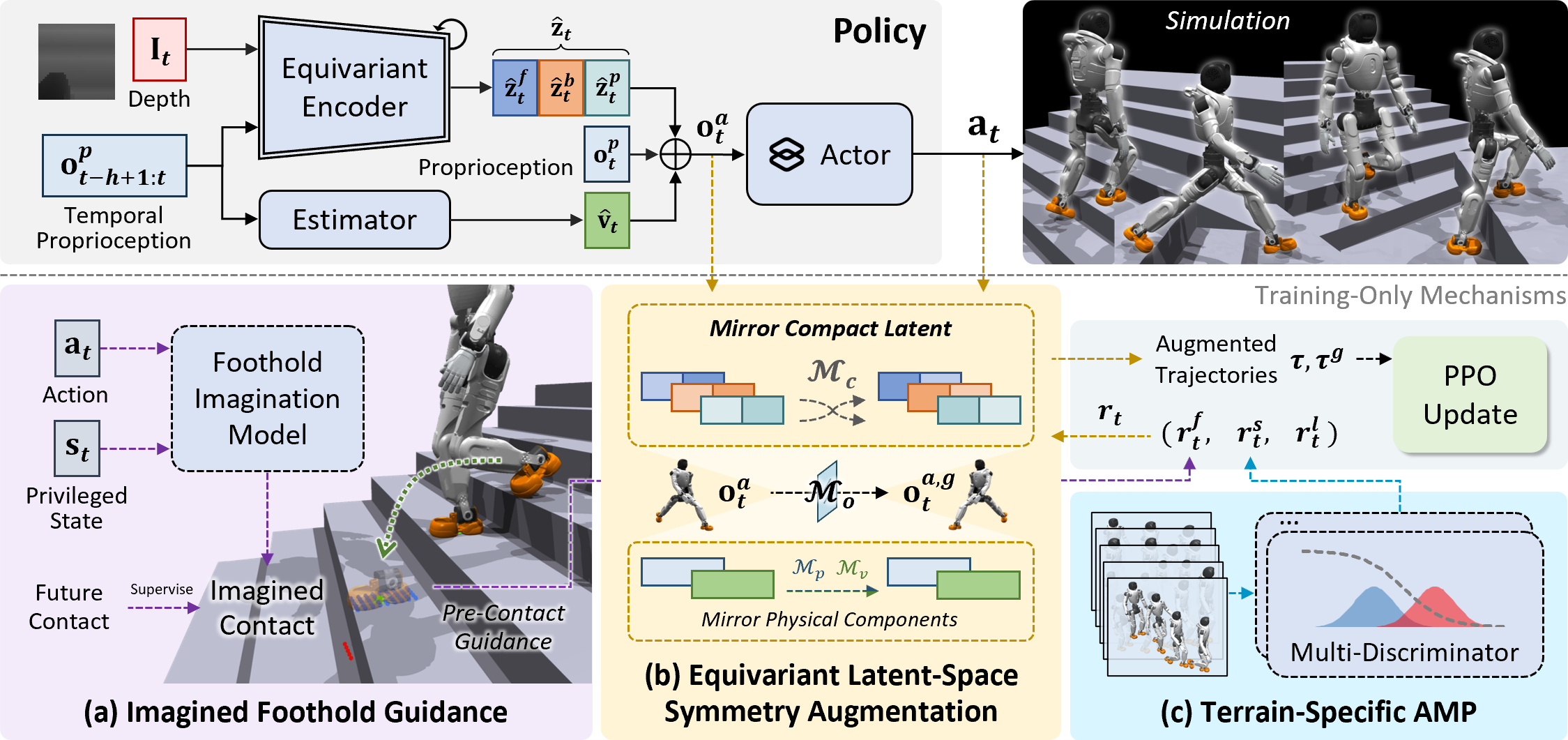
Extending humanoid traversal to open-world human environments is essential for real-world deployment but remains challenging. The robot must use vision to ensure safe and reliable foot placement on heterogeneous terrain under highly dynamic motion, while producing coordinated, natural whole-body behaviors. We propose SSR, an efficient end-to-end framework for egocentric vision-based humanoid traversal that jointly learns these capabilities. SSR introduces imagined foothold guidance, which learns to model forthcoming swing-foot contacts and support to guide pre-touchdown swings toward stable regions, reducing edge slips. It further employs a compact equivariant latent-space symmetry augmentation to efficiently induce bilateral coordination under high-dimensional visual observations, together with terrain-specific multi-discriminator motion priors that preserve human-like behavior across scenes. Extensive experiments show that SSR achieves safe, stable, and high-quality locomotion on diverse real-world terrains, including stairs with varied structures and extreme challenges such as wide gaps and high platforms, while enabling reliable long-horizon traversal in open outdoor environments.
Stairs: Varied Structures
SSR stably traverses diverse stair structures, including narrow open-riser stairs and spiral staircases.
High Platforms
Gaps
Grassy Slopes
Perturbation Robustness Test
Stair Push Recovery
Trolley Disturbance Rejection
Out-of-Distribution Generalization
Slippery Trolley
Perforated Grids
Movable Pallets
Long-Horizon Traversal in the Open World
The robot completes a continuous 1.3-km open-world traversal in 40 min.
This video has been trimmed and sped up for brevity.
The clips above provide close-up views of open-world traversal. Hover over any clip to view it at normal speed.
Cross-Platform Deployment
Cross-embodiment validation on a full-size humanoid platform (1.8 m, 70 kg).
BibTeX
@article{yu2026ssr,
title={SSR: Scaling Surefooted and Symmetric Humanoid Traversal to the Open World},
author={Yu, Ruiqi and Wang, Yiwen and Hao, Yuan and Wu, Jun and Zhu, Qiuguo},
journal={arXiv preprint arXiv:2605.30770},
year={2026}
}